
ROSAForum
Forum about ROSA Linux Distros
Читалки книг в rosa
Читалки книг в rosa
Сообщение Kap18 » 19 май 2017, 13:24

Re: Читалки книг в rosa
Сообщение VictorR2007 » 19 май 2017, 16:07
Re: Читалки книг в rosa
Сообщение Kap18 » 19 май 2017, 17:57
Re: Читалки книг в rosa
Сообщение keleg » 19 май 2017, 18:14

Re: Читалки книг в rosa
Сообщение Sartorius » 19 май 2017, 21:26
Re: Читалки книг в rosa
Сообщение Kap18 » 20 май 2017, 13:07

Re: Читалки книг в rosa
Сообщение psicho666 » 21 май 2017, 19:14
Re: Читалки книг в rosa
Сообщение Sartorius » 21 май 2017, 19:56
Re: Читалки книг в rosa
Сообщение psicho666 » 21 май 2017, 21:28
Книги по rosa linux

С чего начать работу в Rosa Fresh Linux и изучение линукс
Многие новички, которые приходят в группу Rosa ВК часто задают вопросы: «Что же такое Rosa?», «С чего начать изучение Rosa Linux и линукс в целом?»
Давайте поговорим об этой интересной теме.
Знакомство с дистрибутивом Rosa Fresh рекомендуется начать с ознакомления с историей и описанием Rosa, а так же с просмотра небольшого видеообзора:
1. Немного о истории дистрибутива ROSA Fresh и других дистрибутивов линукс
https://vk.com/topic-33847957_34804900
3. Краткий видеообзор Rosa Fresh KDE5 R11 Plasma https://www.youtube.com/watch?v=7icw8iyxwKo
Rosa Fresh R11 доступна с несколькими рабочими средами: KDE4, KDE5 Plasma, XFCE, LxQT
Скачать iso-образ дистрибутива можно с вики-страницы проекта (ссылки для скачивания под картинками в разделе Окружения рабочего стола)
http://wiki.rosalab.ru/ru/index.php/Заглавная_страница
Для записи установочного образа Rosa используйте фирменную утилиту Rosa Image Writer, чтобы правильно записать образ на usb-флешку.
После установки обновите систему Rosa, когда автоматически будет предложено скачать и установить новые обновления. После установки всех обновлений перезагрузите ПК.
Далее установите видеодрайвер для повышения быстродействия видеосистемы.
Если у вас видеокарта Nvidia, то после установки и первого обновления Rosa Fresh нужно установить закрытый (проприетарный) видеодрайвер, поскольку он самый производительный в 3D. Установка видеодрайвера выполняется графической утилитой в настройках дистрибутива.
Если у вас видеокарта Amd Radeon, тогда в процессе установки Rosa уже был установлен свободный видеодрайвер radeon. Свободный видеодрайвер обеспечивает хорошую производительность видеокарт amd radeon новых поколений.
В процессе работы с дистрибутивом Rosa Fresh, может возникнуть необходимость установить дополнительные нужные для работы программы. В Rosa используется собственный репозиторий (централизованное хранилище программного обеспечения), в котором доступно к установке тысячи программ. Подключение сторонних репозиториев, как в Ubuntu, в Rosa не практикуется.
Процесс установки программ очень простой, достаточно войти в Параметры системы и запустить приложение «Установка и удаление программ».
Откроется окно Управление программами, где в строке поиска вы вводите имя на английском языке (можно часть имени) и нажимаете Поиск. В появившемся списке находите нужную вам программу, кликнете на ней два раза мышкой, чтобы поставить галочку, и нажимаете Выполнить. Процесс установки программы пошел, вы соглашаетесь с предложенным описанием и ждете завершения установки программы. После установки программы закрываете менеджер программ.
Более опытным пользователям рекомендуется использовать командную строку в терминале для установки и удаления программ.
Построение пакета RPM для Rosa Linux на практике
Если Вы уже давно пользуетесь операционной системой Linux и хоть немного разбираетесь в программировании, рано или поздно Вам может понадобиться собрать программу из исходного кода. Может быть, нужной программы не окажется в репозиториях дистрибутива. Или в этих репозиториях программа старой версии, а Вам нужна самая свежая. А может, Вы создали новую программу и хотите поделиться ей с другими пользователями.
Конечно, можно установить программу по инструкциям, прилагаемым к исходному коду. Но тогда управлять файлами программы и следить за её зависимостями нужно будет вручную. Намного лучше собрать пакет с программой и использовать встроенный в операционную систему менеджер приложений.
Надеюсь, эта статья поможет быстрее разобраться со сборкой пакета RPM для Rosa Linux или для другого дистрибутива, использующего менеджер пакетов RPM (Mandriva, RedHat). Или хотя бы подскажет, где искать информацию.
Здесь я покажу, как создавать пакеты RPM на своём локальном компьютере, на простом примере. Будем собирать программу xkb-switch в операционной системе Rosa Linux. Исходники программы будем брать с GitHub.
Оглавление
Немного о Rosa Linux
Rosa Linux — дистрибутив, созданный и поддерживаемый российскими разработчиками. Он сделан на основе Mandriva, но с некоторыми особенностями. Я использую 32-битную версию Rosa Fresh R8, которая выпущена в 2014 году. Сейчас версия R8 уже не поддерживается разработчиками (репозитории для неё не обновляются), но хорошо работает на моём ноутбуке, поэтому не хочется устанавливать новую версию.
Принципы сборки программных пакетов обычно редко изменяются в пределах одного семейства дистрибутивов Linux. Поэтому то, что описано в данной статье, должно работать во всех вариантах дистрибутивов Rosa.
Построение пакетов в Rosa Linux немного проще, чем в некоторых других дистрибутивах, основанных на RPM. Некоторые моменты автоматизированы и не нуждаются в настройке.
Немного об xkb-switch
Мне понравилась идея использовать плагин для текстового редактора Vim — xkbswitch, о котором есть статья на Хабре. Он автоматически переключает раскладку клавиатуры на английский язык при выходе из режима ввода, и обратно — на тот, на котором вводили текст в прошлый раз — если войти в режим ввода снова. Для работы этого плагина нужна программа xkb-switch, которая позволяет переключать раскладку клавиатуры из командной строки и из плагинов для редактора Vim. В репозиториях Rosa Linux R8 этой программы не оказалось (и, скорее всего, никто не будет его добавлять, ведь дистрибутив уже старый, а программа xkb-switch не слишком популярна).
Настройка, доработка, проверка программы
Часто бывает нужно настроить компиляцию программы для правильной работы в конкретном дистрибутиве или даже для конкретной системы. Бывает, что программу нужно собрать с другими опциями или с поддержкой какого-нибудь специального драйвера. А может быть, Вы захотите исправить ошибки в коде программы или просто проверить, работает ли она. Для этого лучше перед началом сборки пакета RPM скопировать исходный код к себе на компьютер, попробовать его собрать и проверить, как работает скомпилированная программа.
Если Вы уверены, что файлы проекта изменять не понадобится, то можно использовать оригинальный исходный код с сайта проекта и сразу приступить к сборке пакета. Но если нужно изменить настройки компиляции, то обычно гораздо проще изменить файл в папке с исходным кодом (так называемый makefile), чем потом разбираться с опциями команд компиляции и внутренним устройством макросов для спек-файла.
Проверяем исходный код без своего профиля в GitHub
Если Вы решили поработать с исходным кодом или настройками компиляции проекта, но у Вас нет своего профиля в GitHub или не хочется его использовать, можно просто скачать и распаковать исходный код. В нашем случае это могло бы выглядеть так (я использую папку
/Projects/cpp для исходных кодов на C++):
После этого, чтобы использовать изменённый проект, придётся очистить или удалить папку build из проекта и упаковать исходный код в архив. Это может выглядеть так:
Файл xkb-switch.zip потом нужно будет использовать для сборки пакета.
Проверка с сохранением проекта в свой профиль GitHub
Я предполагаю что тот, кто читает этот раздел, хоть немного знаком с работой с git и уже завёл себе профиль в GitHub. Считаю этот способ самым лучшим, поэтому в оставшейся части статьи будет подразумеваться, что используется именно он, если не сказано другое.
Сначала нужно «форкнуть» оригинальный проект в свой GitHub. После этого, как в прошлом способе, клонируем проект к себе на компьютер, но уже из своего репозитория (в моём случае, имя пользователя — alexandersolovyov):
После этого можно сделать pull-request, если это нужно.
Можно сделать ссылку на оригинальный репозиторий:
И потом обновлять основную ветку своего репозитория, чтобы она соответствовала оригиналу:
Код программы, соответствующий исправленной ветке, можно будет использовать при сборке RPM. Для этого в спек-файле нужно будет указать адрес к архиву в таком виде:
Но, как подсказал пользователь specblog, вообще-то так делать неправильно. Лучше передать свои изменения в виде патчей. Для этого нужно создать файлы патчей из изменений в своей ветке и скопировать их в папку с исходниками для сборки пакета (
/rpmbuild/SOURCES/ ). Потом нужно будет указать их в спек-файле. Это мы рассмотрим немного позже, но если хотите — можно прочитать здесь. Если Вы не знаете, как создавать патчи, — можно заглянуть под спойлер.
Создание патчей
Патчи, они же Заплатки — это файлы, в которых записаны изменения в исходном коде программы. Их используют как альтернативу командам git pull и git push для связи между локальными репозиториями кода в том случае, если «вытягивать» изменения из удалённого репозитория не удобно, или история изменений проекта и принципы работы с ним такие, что лучше использовать патчи.
Теперь нужно сохранить изменения в виде файлов патчей в папку
/rpmbuild/SOURCES (если Вы используете не Rosa Linux, путь к папке SOURCES может быть другим). Например так (подразумеваю, что мы находимся в папке проекта — например,
/Projects/cpp/xkb-switch — и на ветке cmake_corrections ):
А можно вспомнить (или посмотреть), сколько коммитов назад мы ответвились от основной ветки, и сделать патчи на определённое количество коммитов назад. Например, если мы сделали два коммита, команда будет такая:
Можно указать диапазон коммитов, из которых нужно сделать патчи, поставив две точки между ссылками на начальный и конечный коммит:
Название каждого файла патча состоит из порядкового номера и первой строки комментария коммита. Поэтому лучше переименовать каждый файл так, чтобы описание патча более коротко и ясно описывало его суть. Например так:
соглашение о наименованиях патчей в статье о синтаксисе спек-файла советует перед описанием каждого файла патча добавить название_пакета-версия-rosa-. Может быть, это хорошая практика, если Вы передаёте патчи по электронной почте, но не для построения пакетов. Мы строим пакеты на своём компьютере, поэтому лучше очищать папку
/rpmbuild/SOURCES каждый раз перед тем, как собирать пакет с другой программой или пакет новой версии.
Подготовим «рабочее место» для создания пакета
Для начала нужно создать структуру каталогов. Вся сборка происходит в папке rpmbuild в домашней папке пользователя. Создадим начальную структуру каталогов и перейдём в папку для спек-файлов:
Для Rosa Linux этого достаточно: остальные папки будут созданы автоматически.
В другом дистрибутиве для построения пакета может использоваться другое расположение файлов. А ещё, может быть, придётся создать всю иерархию папок вручную. Ищите информацию для Вашего дистрибутива, если Вы используете не Rosa Linux. Например, вот так это может выглядеть в Red Hat.
Если после сборки программы Вы захотите собрать ещё одну или ту же самую, но другой версии, то нужно будет удалить все файлы из папки
Начнём создавать спек-файл
Основа построения пакета RPM — так называемый спек-файл. Этот файл содержит инструкции для программы rpmbuild (вернее rpm ), необходимые для сборки пакета.
Создадим файл xkb-switch.spec в папке
Немного о синтаксисе спек-файла
Заголовок спек-файла
В спек-файле сначала всегда пишется заголовок. Это список опций, которые относятся к основному пакету RPM. Когда пакет будет готов, почти вся эта информация будет показана при просмотре его описания. Вот что обозначают отдельные строки:
Release:
Номер версии самого пакета. Отображает, который раз собирается пакет с программой одной и той же версии. В нашем случае это «1», так как никто раньше не собирал программу этой версии. В идеальном случае, если мы уже пытались собрать пакет и сборка доходила до конца (даже если были ошибки), то после каждой новой попытки нужно увеличивать это число на 1 и при этом не удалять старые собранные пакеты из папок rpmbuild/RPMS и rpmbuild/SRPMS : рядом будут созданы новые пакеты с новым номером сборки. Наверное, так нужно делать если использовать специальный сервер для сборки. Мы же используем свой компьютер и вместо этого будем очищать папки. Если пакет с программой такой версии уже есть в репозиториях дистрибутива Linux, но Вы собираете с другими настройками, то лучше указать номер релиза на 1 больше, чем у того пакета.
URL:
Адрес в интернете, откуда можно скачать оригинальный исходный код программы. Он будет указан при просмотре информации о пакете RPM. Этот пункт заполнять не обязательно, но мы укажем: https://github.com/ierton/xkb-switch
Source0:
Имя файла архива, содержащего исходный код, или адрес в интернете, по которому его можно скачать. Если указать адрес в интернете, то при первой сборке файл будет скачан в
/rpmbuild/SOURCES (рядом со скачанным архивом с исходниками). Имя каждого файла нужно писать без пути к нему. Здесь не обязательно указывать все файлы патчей, — можно только те, которые Вы хотите применить.
AutoReq:, AutoProv:
Если Вы собираете программу, которая написана на языке, с которым менеджер rpm плохо знаком, или которая является проприетарной, и зависимости не определяются правильно автоматически, то можно отключить автоматическое определение Возможностей (с помощью AutoProv: no ) и/или Зависимостей (с помощью AutoReq: no ).
%description
Этот блок уже не является частью заголовка, но связан с ним. Он добавит полное описание программы в пакет RPM. После него должна быть оставлена пустая строка. Описание может быть таким:
Дальше, после разделительной черты-комментария, следуют команды и макросы, которые нужно выполнить до упаковывания файлов. Все эти команды разделены на блоки, определённые с помощью специальных ключевых слов.
Подготовка исходников
Можно сразу попробовать собрать пакет, останавливаясь после выполнения блока %prep :
Выполним наш скрипт
Подробнее о добавлении патчей можно почитать на сайте Maximum RPM.
Теперь можно двигаться дальше.
Компиляция
В конце вывода видим exit 0 : всё сделано без ошибок.
Вообще, в блоках команд не обязательно использовать только одни макросы. Можно добавить любые команды shell (то есть bash или zsh, или что там у Вас). Команда rpmbuild во время сборки перемещается по папкам, поэтому нужно добавить переход в правильную рабочую папку перед своей командой. В этих командах shell можно использовать константы спек-файла — как и в любом другом месте этого файла. (Использование констант мы увидим ниже.)
Если Вам нужно собрать какой-нибудь необычный пакет, тогда, скорее всего, придётся использовать в блоке %build команды shell вместо макросов.
Инсталляция
Вернее, псевдоинсталляция. В блоке %install должны выполниться действия, в результате которых скомпилированные файлы программы будут находиться в папках с точно такой же иерархией, как у корневой папки системы, но внутри папки
Здесь полное_имя_пакета будет состоять из имени, указанного с помощью опции Name: в заголовке спек-файла, версии программы ( Version: в спек-файле), номера релиза ( Release: в спек-файле), названия дистрибутива, его версии и архитектуры процессора.
В конце псевдоинсталляции проверяется список файлов, которые нужно будет добавить в пакет RPM. В нашем спек-файле его ещё нет, поэтому будет сообщение об ошибке.
Упаковка файлов
В сообщении об ошибке после псевдоинсталляции есть список файлов, которые ещё не отмечены в спек-файле для упаковывания. Этот же список можно узнать, просмотрев всё содержимое папки
Чтобы указать, какие файлы должны быть добавлены в пакет, нужен блок %files в спек-файле. Мы удалили строки, нужные для поддержки нескольких языков, поэтому такого блока в файле нет. Создадим его.
Во многих системах принято располагать блок %files внизу спек-файла. Это логично, ведь он выполняется последним. Но в Rosa Linux его принято писать сразу перед блоком %prep (и разделительной строкой-комментарием в нашем случае). Так все настройки, касающиеся подготовки файлов, будут находиться в конце файла, а то, что касается сборки пакета из этих файлов — в верхней части. Это особенно удобно если нужно построить несколько пакетов одним спек-файлом (да, так тоже можно делать, и мы рассмотрим это ниже).
В блоке %files должен быть список файлов, которые должны быть в пакете RPM. Итак, создадим блок над разделительной чертой:
Теперь попробуем построить пакет полностью:
`xkb-switch.i586: E: incoherent-version-in-name (Badness: 50) 1`
Ошибка: версия в имени библиотечного пакета указана неверно.
`xkb-switch.i586: E: executable-in-library-package (Badness: 1) /usr/bin/xkb-switch`
Ошибка: в библиотечном пакете находится исполняемый файл.
Всё понятно? Не думаю. Давайте разберёмся подробнее, что здесь происходит.
Что такое rpmlint
Если Вы пользуетесь другим дистрибутивом, и проверка не запускается автоматически, тогда нужно проверить построенные пакеты вручную. Для этого нужно перейти в папку
Виды пакетов RPM для Rosa Linux
Пакеты для Rosa Linux делятся на 6 видов. В идеальном случае, каждый собранный пакет должен соответствовать только одному из этих видов.
Наш результат
Теперь всё стало яснее.
В результате у нас получился такой спек-файл:
Если нужно разделить пакет на части
Может понадобиться разделить проект на несколько пакетов — например, если библиотека из этой программы будет использоваться другой программой. Чтобы рассмотреть такой вариант, давайте представим, что нам нужно разделить файлы проекта xkb-switch на 3 пакета: исполняемый, библиотечный и для разработки. Тогда:
Для этого нужно сделать изменения в спек-файле. О том, как это сделать,
можно узнать из соответствующего раздела онлайн-книги Maximum RPM. Также может быть полезен пример спек-файла для libxkbfile и Политика оформления библиотек Rosa Linux.
Давайте попробуем это сделать.
Добавим немного макросов
Для удобства работы можно добавить несколько макросов — по примеру спек-файла для libxkbfile. Добавим в начало нашего спек-файла такие строки:
Макрос %mklibname берёт строку «lib», добавляет к нему первый аргумент, а к тому что получилось — второй аргумент (и все следующие). То есть значением константы %
Немного изменим заголовок
Приведём строку с опцией Version: к виду
для того, чтобы указывать самое главное число версии только в одном месте спек-файла.
Теперь мы будем использовать заголовок спек-файла в качестве заголовка для пакета исполняемого файла. Поэтому можно немного изменить его описание. В итоге заголовок будет выглядеть так:
Определим пакеты библиотек
В Rosa Linux принято объявлять под-пакеты под блоком %description заголовка спек-файла. Определим пакет библиотеки libxkbswitch1 так:
Ниже объявим пакет для разработчиков:
Определим файлы для пакетов
Таким образом мы определили, что:
Первые два обозначают, что для пакетов библиотек не указана документация. Это можно решить, добавив файл документации в пакет. Со вторым всё немного сложнее. Давайте попробуем разобраться.
Решение дополнительных проблем
Итак, чтобы убрать предупреждение об отсутствии документации, можно притвориться, что документация к библиотекам хранится в файле README.md проекта. Добавим его в блоки %files для пакетов библиотеки и разработки — с помощью макроса %doc :
Здесь не нужно указывать полный путь. Рабочая папка макроса %doc — папка с распакованными исходниками. Поэтому в документацию пакетов будет добавлен файл
Можно попробовать очистить папки и собрать пакеты заново, но… предупреждение об отсутствии зависимости всё равно останется. Если проверить зависимости пакета libxkbswitch-devel ещё раз, то увидим, что зависимость успешно добавляется. Скорее всего сообщение остаётся потому, что в нашем пакете для разработки нет заголовочных файлов, и rpmbuild не может определить эту зависимость автоматически.
Спек-файл, который у нас получился (с файлом README.md в качестве документации библиотек), — под спойлером:
Вывод
Мы рассмотрели, как можно построить несложный пакет RPM для операционной системы Rosa Linux (и других систем использующих такой же менеджер пакетов). Также мы научились создавать несколько связанных пакетов, используя один спек-файл. Конечно, здесь не затронуто очень много тем — таких, как применение патчей, использование настроек rpmrc, или сборка пакетов на сервере ABF вместо локального компьютера, — но это было бы слишком много для одной статьи.
Если Вам нужно собрать более сложный пакет — пользуйтесь приведённой ниже информацией, анализируйте готовые пакеты и примеры спек-файлов, и не забудьте о поиске в Интернет и ман-страницах команд, — и у Вас всё получится.
Основные команды
Команды для сборки пакета
Проверка готового пакета
Обзор и установка Linux ROSA Desktop Fresh R6
Всем привет, материал сегодня будет посвящен знакомству с дистрибутивом Linux ROSA Desktop Fresh R6 от российской компании «НТЦ ИТ РОСА», который по моему мнению является неплохим вариантом бесплатной операционной системы для домашнего компьютера.
И начну я с того, что да действительно дистрибутив Linux ROSA Desktop Fresh R6 мне понравился он выглядит красиво и оригинально, достаточно производителен, включает все необходимое и популярное программное обеспечение и что, наверное, обрадует многих он бесплатный. Об этом и многом другом мы и будем сейчас разговаривать, а для начала я хотел бы напомнить, что мы уже рассматривали один дистрибутив Linux, разработкой которого занимается наш российский программист это Point Linux, но он ориентирован на простоту, быстроту и подойдет тем, кому не нужны всякие там красивости. А вот если Вы хотите простой, быстрый, удобный и в то же время красивый и функциональный интерфейс своей операционной системы то Вам лучше приглядеться к дистрибутиву ROSA Desktop Fresh R6.
Дистрибутив Linux ROSA Desktop Fresh R6

ROSA Desktop Fresh R6 – бесплатный дистрибутив операционной системы Linux, разработкой и развитием которого занимается российская компания «НТЦ ИТ РОСА» и сообщество дистрибутива. Данный дистрибутив идет в ногу со временем и ориентирован на новизну, о чем свидетельствует оригинальный интерфейс системы и новые версии программ, которые включены в него по умолчанию.
В качестве среды рабочего стола по умолчанию выступает KDE, но можно также установить GNOME, LXDE, XFCE, Mate и Enlightenment.
Дистрибутив поддерживает архитектуры процессора i586 и x86_64. Он является многоязычным и, конечно же, поддерживает русский язык.
На заметку! Начинающим пользователям Linux рекомендую почитать мою книгу « Linux для обычных пользователей » – в ней я максимально простым языком рассказываю про основы Linux и как пользоваться этой операционной системой без командной строки
Как я уже сказал, ROSA Desktop Fresh обладает оригинальным и самое главное интересным дизайном чему способствуют собственные разработки компании, например:
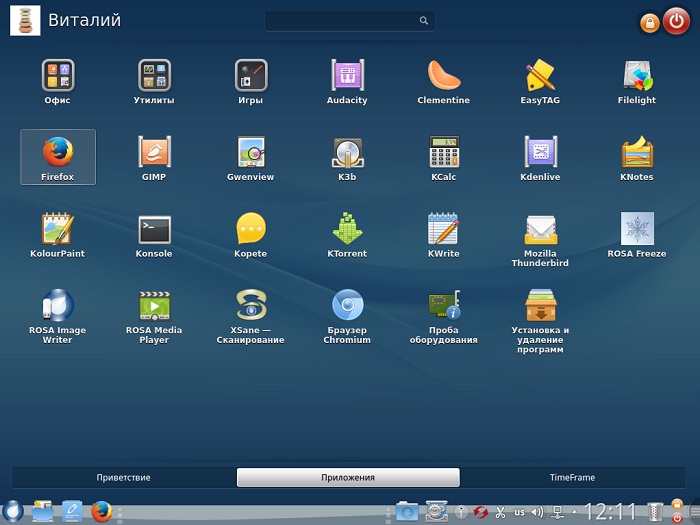
SimpleWelcome – это единая точка запуска приложений, сгруппированных по своему функциональному назначению, например Интернет, офис, графика, игры и т.д. SimpleWelcome имеет следующие возможности:
Лично мне SimpleWelcome напомнило меню пуск в Windows 8, т.е. плитка, хотя, конечно же, дизайн отличается.
RocketBar — панель быстрого запуска приложений в нижней части экрана с возможностью переключения между ними. Одним из отличий RocketBar от стандартной панели KDE является возможность использовать иконки большого размера.
TimeFrame — это инструмент позволяющий отслеживать активность пользователя на ленте времени, например, находить файлы, которые Вы редактировали или создавали по определённым датам.
StackFolder — это функционал, который позволяет организовать быстрый доступ к наиболее часто используемым папкам и файлам.
ROMP (ROSA Media Player) – проигрыватель мультимедиа файлов.
Действующая стабильная версия
Актуальной на момент написания статьи является версия ROSA Desktop Fresh R6, она вышла 15 июля 2015, которая включает в себя следующие версии компонентов и программного обеспечения:
Также в эту версию, по сравнению с предыдущим выпуском (R5), включено достаточно много изменений связанных с компонентами SimpleWelcome и TimeFrame, изменения есть и в инсталляторе дистрибутива.
Системные требования
Где скачать Linux ROSA Desktop Fresh R6?
Скачать ROSA Desktop Fresh R6 можно со страницы загрузки официального сайта вот она http://www.rosalinux.ru/rosa-linux-download-links/. Где Вам необходимо в разделе «Операционная система ROSA Fresh KDE R6», выбрать 32 или 64 битный ISO образ и нажать «Загрузить».
Установка Linux ROSA Desktop Fresh R6
Сразу скажу, что установка простая и если Вы хоть раз устанавливали любую операционную систему Linux или Windows, то Вы легко справитесь с установкой дистрибутива ROSA Desktop Fresh R6.
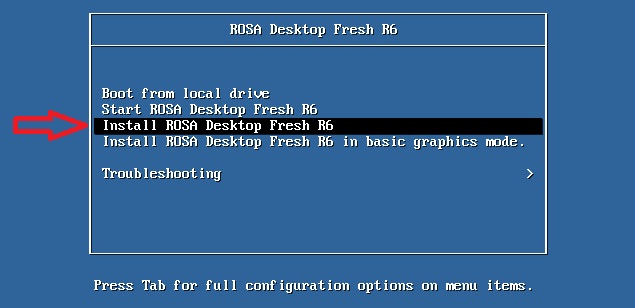
Шаг 1
Загружаемся с диска и попадаем в меню, где выбираем «Install ROSA Desktop Fresh R6», для того чтобы установить дистрибутив на жесткий диск компьютера.
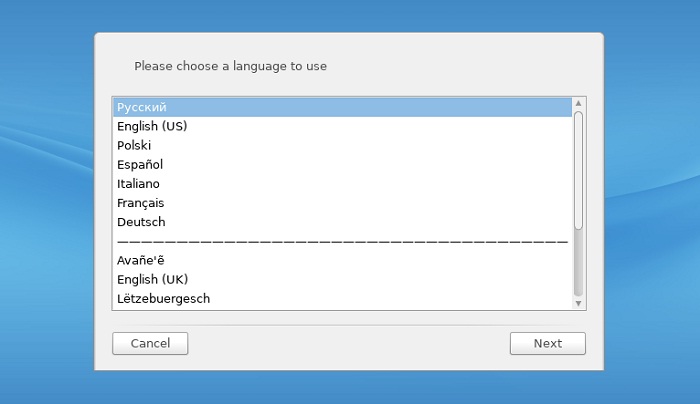
Шаг 2
И первое что мы делаем, это выбираем язык и жмем «Next»
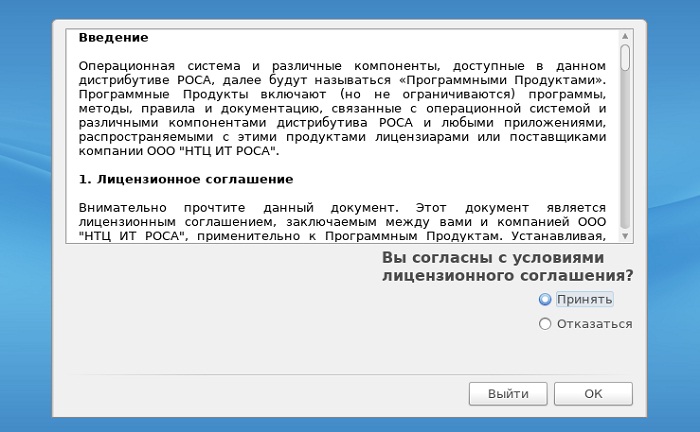
Шаг 3
Затем соглашаемся с условиями лицензионного соглашения и жмем «ОК»
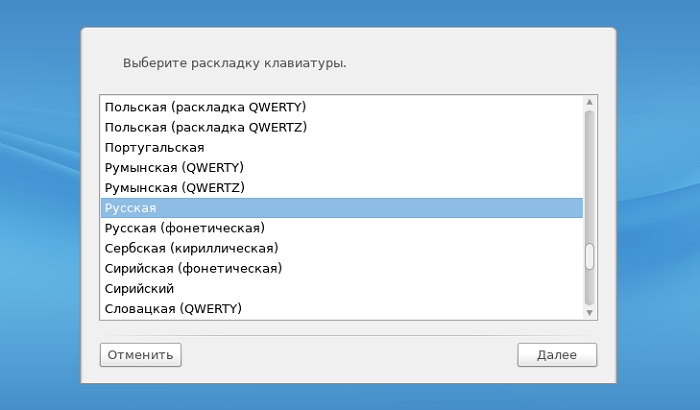
Шаг 4
Далее выбираем раскладку клавиатуры и жмем «Далее»
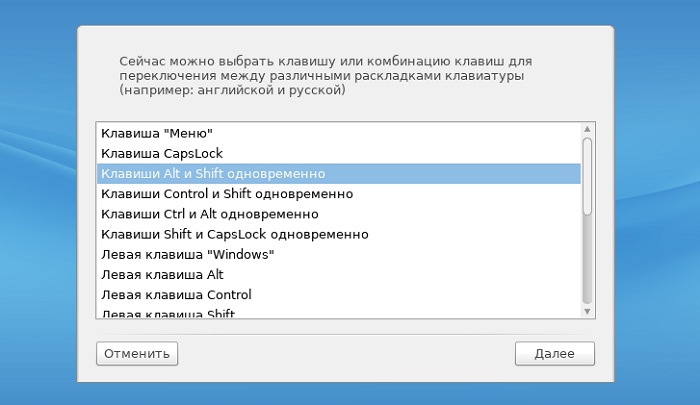
Шаг 5
Также выбираем способ переключения раскладки клавиатуры, т.е. сочетание клавиш и жмем «Далее»
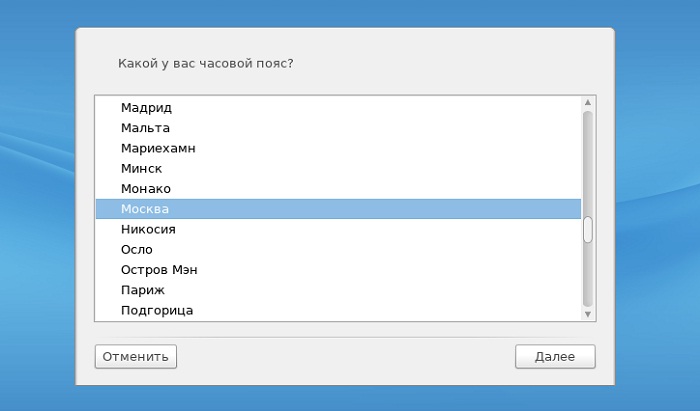
Шаг 6
Потом необходимо выбрать часовой пояс и нажать «Далее»
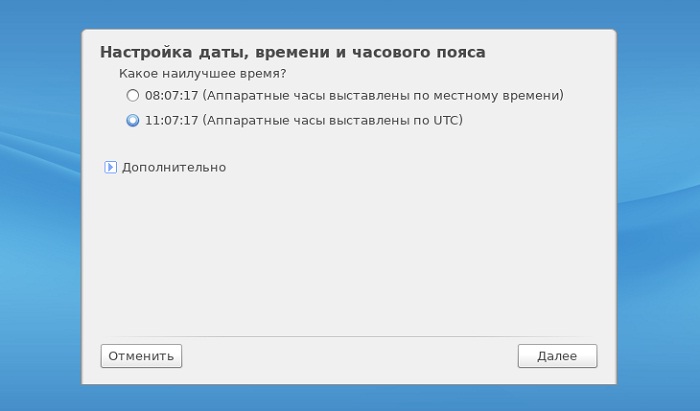
Шаг 7
Затем настраиваем дату и время, жмем «Далее»
Шаг 8
На этом шаге мы можем настроить разметку диска, в качестве примера я выберу пункт «Использовать свободное место» и в этом случае разметка выполнится автоматически, но если Вы хотите сами разметить диск, то выбирайте «Ручная разметка диска», жмем «Далее»
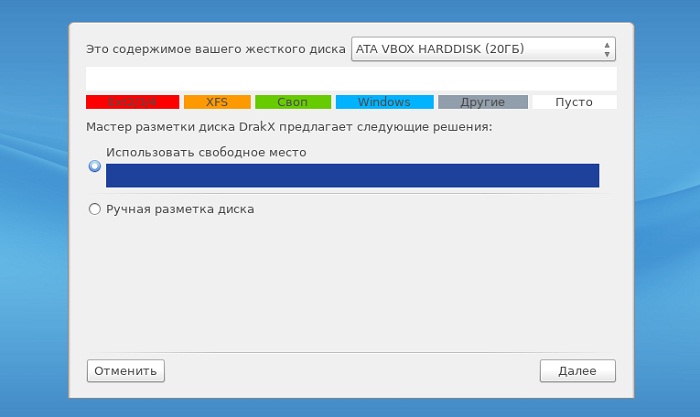
В итоге после создания разделов начнется установка, а в это время Вы можете посмотреть слайды.


Шаг 9
Затем настраиваем загрузку ОС и жмем «Далее»
Шаг 10
Устанавливаем пароль для суперпользователя root, жмем «Далее»
Шаг 11
Здесь нам необходимо создать пользователя и задать пароль для него, жмем «Далее»
Шаг 12
Потом задаем имя компьютера и жмем «Далее»
Шаг 13
Указываем сервисы, которые будут запускаться при загрузке, и жмем «Далее»
Шаг 14
Вот и все установка завершена, осталось только перезагрузить компьютер, для этого жмем «Завершить»
После перезагрузки компьютера появится окно входа, в котором мы вводим свой пароль и жмем «Enter»
Скриншоты Linux ROSA Desktop Fresh R6
Рабочий стол
SimpleWelcome
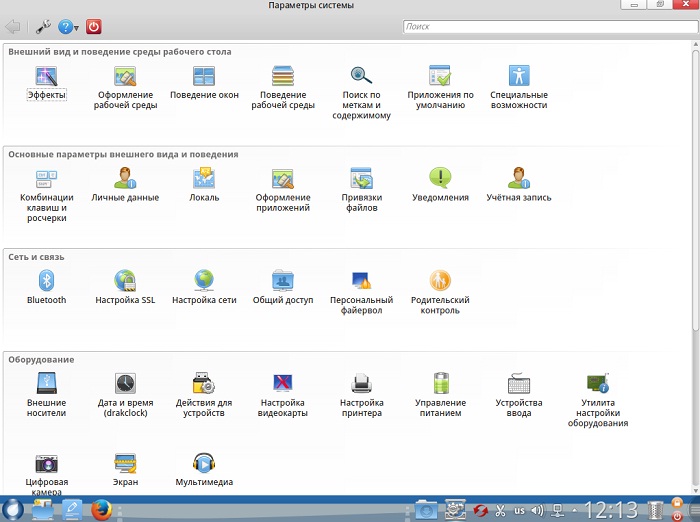
Параметры системы
Файловый менеджер