
ОБЩИЕ СВЕДЕНИЯ О ПРОГРАММНОМ КОМПЛЕКСЕ «МВТУ»
СОДЕРЖАНИЕ
1. ОБЩИЕ СВЕДЕНИЯ О ПРОГРАММНОМ КОМПЛЕКСЕ «МВТУ» ……………..3
1.1. Назначение, режимы работы, особенности и достоинства ПК «МВТУ» ………. 3
1.2. Требования к компьютеру …………………………………………………………. 4
1.3. Установка программного комплекса «МВТУ» на Ваш компьютер ………………4
1.4. Запуск программного комплекса «МВТУ» …………………………………………7
1.5. Структура и состав ПК «МВТУ» ……………………………………………………8
1.6. Командное меню Главного Окна …………………………………………………..11
1.7. Панель инструментов Главного Окна …………………………………………. 13
1.8. Дополнительная панель инструментов …………………………………………. 14
2. ОПИСАНИЕ ПРОЦЕДУР РАБОТЫ В ПК «МВТУ» ………………………………….18
2.1. Основные этапы работы в среде ПК «МВТУ» …………………………………. 18
2.2. Демонстрационный пример по динамике САР ядерного реактора ……………. 18
2.3. Демонстрационно-ознакомительная задача ………………………………………22
2.3.1. Исходные данные для ознакомительной задачи …………………………. 22
2.3.2. Ввод структурной схемы и исходных данных ……………………………..22
2.3.3. Моделирование переходных процессов и вариантные расчеты ………….29
2.4. Основные методы и процедуры работы в режиме АНАЛИЗ ……………………32
2.4.1. Анализ амплитудно-фазовых частотных характеристик ………………….32
2.4.2. Определение полюсов, нулей и коэффициентов
2.4.3. Анализ нелинейных САР с использованием критерия В.М. Попова ……..44
2.5. Основные методы и процедуры работы в режиме ОПТИМИЗАЦИЯ …………..51
2.6. Новые методы формирования математической модели САР в ПК «МВТУ» …..58
2.6.1. Преобразование математического описания САР и формулирование
задач очередного дополнительного задания ……………………………….58
2.6.2. Создание «параллельной» САР в виде новой Субмодели ………………. 60
2.6.3. Задание параметров САР через механизм Глобальных параметров………62
2.6.4. Формирование уравнений динамики с использованием
2.6.5. Формирование уравнений динамики САР в переменных состояния ……..69
2.6.6. Реализация «беспроводной» передачи данных …………………………….72
ОБЩИЕ СВЕДЕНИЯ О ПРОГРАММНОМ КОМПЛЕКСЕ «МВТУ»
Требования к компьютеру
При установке ПК «МВТУ» персональный компьютер должен удовлетворять следующим требованиям:
§ объем оперативной памяти – не менее 16 Мб;
§ свободный объем на жестком диске – не менее 5 Мб;
§ версия WINDOWS – любая (’98, NT, ‘2000), желательно русифицированная.
Рекомендуется следующие параметры монитора: 800х600 для 14-ти и 15-ти дюймовых мониторов, 1024х768 для 17-ти дюймовых и 1280х1024 для 19-ти дюймовых мониторов; размер шрифта – желательномелкий шрифт.
Запуск программного комплекса «МВТУ»
Запуск ПК «МВТУ» осуществляется файлом Mbty. exe, расположенным в подкаталоге BIN. В среде WINDOWS ПК «МВТУ» может быть запущен также посредством: кнопки Пуск и меню Программы или Выполнить; Проводника программ; специально созданной для запуска пиктограммы. Более подробная информация о способах запуска программ приводится в Инструкции Пользователя WINDOWS…Через 1. 2 с после запуска на экране монитора появится заставка с фотографией главного корпуса МГТУ им. Н.Э. Баумана и реквизитами авторов ПК «МВТУ» и (см. рис. 1.8).
ЭКРАННАЯ КОПИЯ ЗАСТАВКИ ПК “МВТУ”

ЭКРАННАЯ КОПИЯ ГЛАВНОГО ОКНА ПК “МВТУ”

Имя подкаталога Назначение подкаталога или файла
Или файла
BMP Каталог, предназначенный для хранения оригинальных пиктограмм типовых блоков (созданных Пользователем) в bitmap-формате;
Mbty. еxe Главный исполняемый файл, обеспечивающий: функционирование графического редактора и интерфейсных процедур; выбор и управление численными алгоритмами расчета и т.д.;
Mbty. dat Файл, обеспечивающий «разрешение» запуска ПК «МВТУ»;
UnInstal. exe Исполняемый файл, обеспечивающий удаление ПК «МВТУ» (каталог на жестком диске и соответствующая папка в меню Программы оболочки WINDOWS);
UnInstal. dat Файл, обеспечивающий «разрешение» на процедуру удаления ПК «МВТУ» (каталог с жесткого диска и папку из меню Программы);
About. dll Дополнительный исполняемый файл, обеспечивающий вызов заставки ПК «МВТУ»;
B mplib. dll Дополнительный исполняемый файл, обеспечивающий вызов стандартных пиктограмм типовых блоков;
H clib. dll Вспомогательный исполняемый файл, обеспечивающий работу блоков Специализированной библиотеки Теплопроводность;
Kinlib.dll Вспомогательный исполняемый файл, обеспечивающий работу Специализированной библиотеки Кинетика нейтронов;
r obot.dll Вспомогательный исполняемый файл, обеспечивающий расчетные процедуры Специализированной библиотеки Роботы;
Robotlib.dll Вспомогательный исполняемый файл, обеспечивающий вызов и работу специализированного блока Многозвенный робот;
Statlib. dll Вспомогательный исполняемый файл, обеспечивающий работу блоков Специализированной библиотеки Статистика;
Stdl ib. dll Дополнительный исполняемый файл, обеспечивающий работу Общетехнической библиотеки типовых блоков;
V odalib. dll Вспомогательный исполняемый файл, обеспечивающий работу ряда блоков Специализированной библиотеки Свойства;
Mbty. cnt Вспомогательный файл справочной системы;
Mbty. hlp Основной файл справочной системы;
V oda. tbl Файл данных (электронная таблица) со свойствами воды и пара.
В подкаталог DEMO типовой комплектации ПК «МВТУ» включены файлы демонстрационных примеров, соответствующих как широко известным («классическим») динамическим задачам, так и менее известным задачам из ряда технических дисциплин. Демонстрационные примеры отсортированы по отдельным подкаталогам (поддиректориям) в соответствии с используемыми методами анализа динамики систем автоматического управления или в соответствии с технической направленностью примеров, причем подкаталог …\ DEMO\ ROBOT содержит внутри себя еще 2 подкаталога с демонстрационными примерами по динамике следящих приводов с непрерывным и цифровым (дискретным) управлением, соответственно.
Перечень подкаталогов и примеров приведен ниже:
Имя файла Назначение демонстрационного примера
Подкаталог DEMO\ ADAPT
adap_pi. mrj Моделирование адаптивного ПИ-регулятора; * )
adap_pid. mrj Моделирование адаптивного ПИД-регулятора; * )
Подкаталог DEMO\ FREQUEN
fre_ a_ pi. mrj Частотные характеристики при адаптивном ПИ-регулировании; * )
Подкаталог DEMO\ IDENTIF
freqpar. mrj Определение амплитуды и фазы АФЧХ управляемой САР;
ident_2.mrj Определение параметров АФЧХ управляемой САР;
Подкаталог DEMO\LAB_WORK
lab83_11. mrj Промежуточный этап демонстрационно-ознакомительной задачи из «Краткой Инструкции Пользователя»;
lab83_21. mrj Заключительный этап демонстрационно-ознакомительной задачи из «Краткой Инструкции Пользователя»;
Подкаталог DEMO\ MIXT
fas_ port. mrj Исследование нелинейной динамической системы 2-го порядка на фазовой плоскости; * )
galaktik. mrj Моделирование орбит звезд и звездных скоплений в гравитационном поле Галактики;
int_vdp3.mrj Моделирование уравнения Ван-дер-Поля при 3-х начальных условиях с использованием интерпретатора математических функций;
lorenz_3. mrj Моделирование странного аттрактора Лоренца;
vdp5_20.mrj Моделирование «сверхжесткого» уравнения Ван-дер-Поля с использованием метода структурного моделирования;
vdp2_29.mrj Моделирование «сверхжесткого» уравнения Ван-дер-Поля с использованием интерпретатора математических функций;
wim. mrj Моделирование широтно-импульсной модуляции;
Подкаталог DEMO\ OPTIM
opt_ pid.mrj Синтез оптимального ПИД-регулятора по 3-м критериям;
opt_ pidd.mrj Коррекция ПИД-регулятора по 3-м критериям;
Подкаталог DEMO\ REACTORS
int_reak.mrj Моделирование динамики простейшей САР ядерного реактора с использованием интерпретатора математических функций;
lab_83.mrj Моделирование динамики САР ядерного реактора в режиме реального времени с учетом обратных связей и нелинейности характеристик стержня и привода СУЗ;
lad8reak.mrj Моделирование динамики САР ядерного реактора при наличии управляющих и возмущающих воздействий с учетом обратных связей и нелинейности характеристики стержня СУЗ;
reak_lab.mrj Исследование режима автоколебаний в релейном автоматическом регуляторе мощности реактора типа РБМК с использованием метода структурного моделирования;
Подкаталог DEMO\ ROBOT
Подкаталог Моделирование динамики следящих приводов с непрерывным
…\ CONTIN управлением (8 примеров);
Подкаталог Моделирование динамики следящих приводов с цифровым
…\ DISKRET (дискретным) управлением (6 примеров).
Примечание. Примеры с меткой * ) не моделируются в ограниченной учебной версии, так как в них число дифференциальных переменных превышает ограничение (не более 10 дифференциальных переменных).
Исходные данные для ознакомительной задачи
Для приобретения навыков самостоятельной работы в среде программного комплекса «МВТУ» выполним все этапы, рекомендованные в подразделе 2.1, применительно к моделированию динамики САР, структурная схема которой приведена на рис. 2.4.
СТРУКТУРНАЯ СХЕМА САР
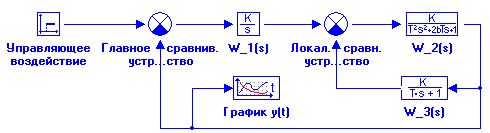
Локальное сравнивающее устройство обеспечивает отрицательную обратную связь, т.е. «работает» в режиме обычного вычитания.
Необходимо подобрать коэффициент усиления k1 интегрирующего регулятора (W1(s)) таким образом, чтобы при подаче ступенчатого управляющего воздействия u(t) = 0.8×1(t) перерегулирование отсутствовало (т.е. ymax

Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим.

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого.

Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций.
Описание работы в среде программного комплекса «МВТУ» в режимах МОДЕЛИРОВЫАНИЕ
Общие сведения
Различные элементы автоматических систем, отличающиеся назначением, конструкцией, принципом действия, оказываются сходными по характеру возникающих в них переходных процессов, т.е. по их динамическим свойствам. Для исследования динамических свойств сложной системы целесообразно классифицировать составные части системы не по функциям, выполняемым ими, а по их динамическим характеристикам.
Любую линейную автоматическую систему можно разбить на элементы, описываемые простыми алгебраическими или дифференциальными уравнениями не выше второго порядка. Такие элементы называются типовыми динамическими звеньями.
Для математического описания типовых динамических звеньев используется передаточная функция – особая (операторная) форма записи дифференциального уравнения элементов и систем. Передаточная функция это отношение лапласового изображения выходной величины элемента или системы к лапласовому изображению входной величины при нулевых начальных условиях. Формально передаточная функция получается из дифференциального уравнения элементов или систем путём замены в уравнении d/dt на p или s, где р – общий оператор преобразования, а s – оператор преобразователь Лапласа. В математических программах чаще всего используется оператор s.
Одной из динамических характеристик типовых звеньев и систем в целом является временная характеристика, которая позволяет определить качество процесса регулирования. Для сравнения временных характеристик типовых звеньев рассматривают возникающий в них переходный процесс при соблюдении двух условий: 1) на вход звеньев подается единичная ступенчатая функция x(t) = 1(t – τ), где τ момент приложения входного воздействия к системе управления (см. рис. 1.1; 2) до приложения входного сигнала звено находится в покое. Переходный процесс при таких условиях может быть описан переходной характеристикой h(t). Переходная характеристика это временная зависимость выходной величины в течение переходного процесса при нулевых начальных условиях и входном ступенчатом воздействии.
 |
Рис. 1.1. Единичная ступенчатая функция
В настоящей лабораторной работе исследуются переходные характеристики следующих типовых динамических звеньев: безынерционного (пропорционального), запаздывающего, инерционного(апериодического) 1-го порядка, инерционного (апериодического) 2-го порядка, колебательного, реального дифференцирующего, идеального дифференцирующего, идеального интегрирующего.
Определения типовых звеньев:
· безынерционное (пропорциональное) звено это звено, выходная величина которого в каждый момент времени пропорциональна входной величие;
· инерционное(апериодическое) звено это звено, выходная величина которого при скачкообразном изменении входной величины изменяется по экспоненте, стремясь к установившемуся значению;
· колебательное звено это звено, выходная величина которого при скачкообразном изменении входной величины имеет колебательную форму;
· дифференцирующее звено это звено, выходная величина которого пропорциональна скорости изменения входной величины;
· интегрирующее звено это звено, выходная величина которого пропорциональна интегралу от входной величины;
· запаздывающее звено это звено, выходная величина которого повторяет входную величину, но с запаздыванием.
Следует знать, что типовые звенья состоят из двух или трёх последовательно включённых элементарных звеньев. Например, инерционное звено состоит из пропорционального звена k и элементарного инерционного звена 1/ (Тр + 1). Такое дробление необходимо особенно при построении частотных характеристик.
Дифференциальные уравнения, передаточные функции и переходные характеристики этих звеньев приведены в табл. 1.1.
Дифференциальные уравнения, передаточные функции и переходные
характеристики динамических звеньев
| Колебательное |  где x где x 
Рис.1.2. Определение Т: а – для экспоненты, б – для обратной экспоненты Для определения параметров T и x инерционного звена второго порядка по экспериментальным данным можно использовать следующий способ. По графику переходной характеристики определяются координаты у(t) и t двух произвольных точек, которые подставляются в выражение для переходной характеристики. В результате получается 2 уравнения, корнями которых являются искомые значения T, x. Однако получаются в этом виде громоздкие уравнения. Для упрощённого расчёта можно применить разложение инерционного звена второго порядка на два звена с постоянными времени Т3 и Т4 по формулам:
Рис. 1.3. Переходные характеристики типовых звеньев: а – безынерционного; б – запаздывающего; в – инерционного 1-го порядка; г – инерционного 2-го порядка; д – колебательного; е – реального дифференцирующего; ж – идеального дифференцирующего; з – идеального интегрирующего Параметры колебательного звена T и x вычисляются путем решения системы уравнений
где
Постоянная Т для реального дифференцирующего звена определяется как проекция на ось времени точки пересечения переходной характеристики горизонтальной линии на уровне 0,37 h(0)(см. рис. 1.2, б), Для идеального интегрирующего звена определяется коэффициент усиления k = h(t1) / t1. Последовательность действий и этапы в режиме МОДЕЛИРОВАНИЕ» Выполнение лабораторных работ по дисциплине «Управление техническими системами» в данном лабораторном практикуме проводится в среде программного комплекса (ПК) «МВТУ» в режимах МОДЕЛИРОВЫАНИЕ и АНАЛИЗ. Команды и опции выполняются либо посредством меню Главного Окна, либо посредством командных кнопок. Формирование, редактирование структурной схемы проекта (задачи), ввод параметров блоков, начальных условий, выбор метода и параметров интегрирования проводятся с использованием как специальных графических процедур, так и посредством команд или командных кнопок. Формирование структурной схемы и ее параметров, выбор метода, параметров интегрирования и т.п. целесообразно проводить в следующей последовательности: — используя «Линейку» типовых блоков заполните Схемное Окно необходимыми блоками примерно так же, как они должны быть расположены в структурной схеме; — используя процедуры «перетаскивания» блоков, изменения ориентации блоков и их размеров придайте структурной схеме «осмысленный» вид; — используя манипулятор типа «мышь», соедините блоки линиями связи; — двигаясь слева-направо и сверху-вниз (по блокам в Схемном Окне) задайте параметры блоков на структурной схеме (коэффициенты усиления, постоянные времени, начальные условия и т.д.); — используя кнопку Параметры расчета, задайте конечное время интегрирования, выберите необходимый метод интегрирования и другие параметры расчета; — запустите задачу на счёт, смотрите текущие результаты в графических окнах и анализируйте …. Исходные данные для исследования приведены в лабораторном практикуме по вариантам. Последовательность действий в режиме МОДЕЛИРОВАНИЕ проводится по этапам. Этап 1 – заполнение Схемного окна Этап 2 – проведение линий связи Этап 3 – ввод параметров структурной схемы Этап 4 – установка параметров интегрирования Этап 5 – оформление поясняющих подписей Этап 6 – открытие Графического окна и ввод его параметров Этап 7 – моделирование и вариантные расчеты Описание работы в среде программного комплекса «МВТУ» в режимах МОДЕЛИРОВЫАНИЕ Откройте ПК «МВТУ» (ярлык находится на рабочем столе). Откроется панель управления (рис.1.4).
Убедитесь, что все демонстрационные примеры, которыми Вы просматривали ранее, закрыты и Схемное Окно отсутствует. Переместите курсор на кнопку Новый
Переместите курсор на «закладку» Источники входных воздействий и щелкните 1 раз левой клавишей «мыши»: Вы инициализировали соответствующую библиотеку типовых блоков. Переместите курсор на блок Ступенчатое воздействие Переместите курсор на «закладку» Динамические звенья, инициализируйте ее, перенесите требуемые блоки (Интегратор, Апериодическое и Колебательное звенья) в Схемное Окно по вышеописанной процедуре приблизительно на желаемые места. В библиотеке указаны только их передаточные функции, поэтому для поиска названия используйте табл.1.1. Для переноса пропорционального звена щелкните «закладку» Функции и перенесите блок Усилитель Далее выполните 2 й этап – проведение линий связи на структурной схеме. Для упрощения этой процедуры рекомендуется включить опцию Сетка в Схемном Окне. Опция Сетка может быть включена следующим способом: переместите курсор на свободное место в Схемном Окне и сделайте однократный щелчок правой клавишей «мыши»: «всплывет» Дополнительное командное меню, в котором необходимо сделать щелчок левой клавишей «мыши» по строке Сетка. Далее, переместите курсор на выходной порт блока Управляющее воздействие, сделайте щелчок левой клавишей «мыши» и, отпустив клавишу, «протяните» горизонтальную линию связи к верхнему входному порту динамического звена. Снова сделайте однократный щелчок левой клавишей: на верхнем входе появится типичная входная стрелка. Если Вы сделали щелчок левой клавишей раньше, чем проводимая связь вошла «в притяжение» входного порта, дотяните линию связи до соответствующего входного порта и сделайте щелчок левой клавишей «мыши». Если требуется сделать поворот на 90 градусов в линии связи, выполните щелчок левой клавишей «мыши» и продолжайте проведение линии связи в новом направлении. Если Вы желаете прервать процедуру проведения линии связи (например, по причине внешнего вида – «некрасивая»), нажмите клавишу Shift и, не отпуская ее, сделайте щелчок левой клавишей «мыши»: линия оборвется. Далее можно удалить эту линию: выделите ее (щелчок левой клавишей «мыши» по линии) и затем удалите линию с помощью командной кнопки Вырезать (пиктограмма «ножницы»). С использованием аналогичных процедур проведите линию связи между динамическим звеном и блоком Временной график. Пример заполнения Схемного Окнадля исследования апериодического звена показан на Рис.1.6.
Если размеры Схемного окна не устраивают Вас, то переместите курсор на левый нижний угол окантовки Схемного Окна (появится специальная наклонная двухсторонняя стрелка типа ) и измените размер Схемного Окна. Далее выполните 3 й этап – ввод параметров структурной схемы. Переместите курсор на блок Управляющее воздействие (подпись Ступенька) и сделайте 2-х кратный щелчок левой клавишей «мыши»: откроется диалоговое окно этого блока с активной «закладкой» Параметры (рис. 1.7). На «закладки» Параметры в диалоговой строке через пробел установлены параметры по умолчанию: задержка импульса 0 с, порог импульса 0, амплитуда 1. При необходимости параметры можно изменить. Откройте «закладку» Общиеввести в специальном поле Заголовок поясняющую подпись под блоком в две строчки Генератор сигналов(рис.1.8). Остальные параметры оставить по умолчанию. Щёлкните кнопкуДа. «Закладка» Входы позволяет изменять расположение входных портов, а «закладка» Выходы – изменять расположение выходных портов. Откройте диалоговое окно Свойство объектов блока с динамическим звеном, введите заданный коэффициента усиления k и постоянную времени Т. На рис.1.9 показано окно с параметрами по умолчанию. Переместите курсор на командную кнопку Параметры расчета (рис. 1.10). Другие «закладки» этого диалогового окна можно не использовать. Если расчётная линия окажется ломанная, то минимальный шаг интегрирования и шаг вывода результатов следует уменьшить. При заданной точности по умолчанию при расчёте появляется окно Сообщение(рис. 1.11), которым можно пренебречь.
Далее выполните 5 й этап – оформление поясняющих подписей. Переместите курсор под блок динамического звена и сделайте 2-х кратный щелчок левой клавишей «мыши»: появится временное окно для ввода текста. Переместите курсор в это окно, сделайте щелчок левой клавишей «мыши» и затем введите заголовок данного блока (в две строки). Переместите курсор на свободное место в Схемном Окне и сделайте 2-х кратный щелчок левой клавишей «мыши»: временное окно закроется и под блоком появится желаемая подпись. Если подпись получилась «некачественной» (с ошибками), снова откройте временное окно для ввода текста (2-х кратный щелчок левой клавишей «мыши» по тексту под блоком) и, используя клавиши редактирования (Backspace, Del и др.), скорректируйте подпись. Далее выполните 6 й этап – открытие Графического окна, ввод и изменение его параметров. В данной работе параметры Графического окна следует оставить по умолчанию. Выполните 2-х кратный щелчок левой клавишей мыши по изображению блока Временной графикв Схемном окне: откроется графическое окно с заголовком График y(t). Если заголовок графического окна будет другим, то закройте графическое окно (щелчок «мышью» по системной кнопке в верхнем правом угле графического окна) и снова откройте его. Для переноса графического окна в другое место необходимо переместить курсор на его заголовок, нажать левую клавишу «мыши» и, не отпуская ее, «перетащить» окно в желаемое место. Изменение его размеров производится так же, как и для любых других окон в среде WINDOWS. Установку других параметров графического окна выполним после проведения процесса моделирования переходных процессов. Далее выполните 7 й этап – моделирование и вариантные расчеты. Переместите курсор на командную кнопку Продолжить Выполним прерванные в подразделе «Этап 6 – открытие Графического окна и изменение его параметров» процедуры редактирования графического окна. Переместите курсор в центральную часть графического окна и сделайте однократный щелчок правой клавишей «мыши»: появится командное меню графического окна (рис. 1.13). Ряд опций командного меню блока Временной график общеприняты и не требуют особых пояснений (Автомасштаб, Курсор, Всегда впереди). Опция Курсор позволяет обмерять графики при помощи дополнительных таблиц с текущими координатами курсора. Опция Список заменяет графическое изображение на таблицу данных. Возврат к графическому изображению осуществляется щелчком правой клавиши «мыши» в поле таблицы и последующим выбором в меню опции Список. Опция Копировать реализует операцию копирования изображения графика в буфер для последующей вставки в соответствующие отчетные документы, например, в текстовые документы WINWORD. Щелкните левой клавишей «мыши» по строке Свойства: откроется специальное диалоговое окно, имеющее заголовок Настройка (см. рис. 1.14). Переместите курсор в диалоговое поле Заголовок и введите новое название Переходная характеристика при k =…., Т = …. Первые 3 кнопки в строке Заголовок предназначены для «привязки» текста заголовка (по левому краю, по центру, по правому краю), а последняя (пиктограмма с буквами) – для задания параметров шрифта заголовка графика. Подпись под осью X (правое диалоговое поле Метка) оставить без изменения. Затем сотрите подпись (Переменная) для оси Y в левом диалоговом поле Метка и введите новую подпись: h(t). Кнопки в обеих строках Метка предназначены для «привязки» текста подписей по осям графика (первые 3 кнопки) и для задания параметров шрифта этих подписей (крайняя правая кнопка). Посредством диалогового окна Настройка можно изменять: цвет и тип линии; цвет и тип линии сетки на графике; цвет поля графика и окантовки. Диалоговые поля Max Y, X, Min Y, X, Делений позволяют настроить график с удобной оцифровкой и пропорциями. Закончив процедуры редактирования параметров графического окна, пример рис. 1.15, переместите курсор на кнопку Да и закройте данное диалоговое окно. Графическое окно будет иметь вид рис. 1.16. Скопируйте отредактированный график (рис. 1.16) в свой файл. График копируется без оболочки Временный график. Закройте все графики, оставив Схемное Окно.В Схемном Окне убрать динамическое звено, а вместо него вставить следующее звено из табл. 1.1. Произведите расчёт по выше изложенной методике для всех звеньев. Программа работы 1. Открыть окно Microsoft Word, присвоить имя, свернуть окно. 2. Открыть программу «МВТУ 3.7». 3. В Схемном окне создать заданную структурную схему. 4. В блоках структурной схемы ввести заданные параметры. 5. Включить расчёт и открыть график. 6. Отредактировать график для обмера и копирования. 7. Копировать график в свой сайт. 8. Пункты 3 – 7 повторить согласно заданию. 9. Обработать графики и рассчитать погрешности. Не пропустите наши новые статьи: Подписаться авторизуйтесь 0 комментариев Старые |
 Постоянная времени T для инерционного звена первого порядка определяется следующим образом. Касательная, проведенная к кривой h(t) в начале координат и продолженная до пересечения с линией установившегося значения переходной характеристики, отсекает на этой линии отрезок, равный постоянной времени Т (см. рис. 1.2, в). Однако этот метод измерения не точен при ручном приложении касательной. Поэтому определение Т следует проводить по построениям, приведённым на рис. 1.2.
Постоянная времени T для инерционного звена первого порядка определяется следующим образом. Касательная, проведенная к кривой h(t) в начале координат и продолженная до пересечения с линией установившегося значения переходной характеристики, отсекает на этой линии отрезок, равный постоянной времени Т (см. рис. 1.2, в). Однако этот метод измерения не точен при ручном приложении касательной. Поэтому определение Т следует проводить по построениям, приведённым на рис. 1.2.
 =
=  =
=  ,
, где Т3,4 = Т1/2 ± √ Т1 2 / 4 – Т2 2 ; Т1 > 2Т2 ; Т3 >Т4 .
где Т3,4 = Т1/2 ± √ Т1 2 / 4 – Т2 2 ; Т1 > 2Т2 ; Т3 >Т4 .  а
а  б
б 


 д
д  е
е  ж
ж  з
з 
 ;
;  .
.
 и сделайте однократный щелчок левой клавишей «мыши»: откроется чистое Схемное Окно(рис.1.5).
и сделайте однократный щелчок левой клавишей «мыши»: откроется чистое Схемное Окно(рис.1.5).
 (подпись Ступенька) и сделайте однократный щелчок левой клавишей «мыши»: фон блока в «Линейке» изменился. Это означает, что блок можно «переносить» в Схемное Окно. Переместите курсор в верхний левый угол Схемного Окна и щелкните 1 раз левой клавишей «мыши»: в поле Схемного Окна появился переносимый блок.
(подпись Ступенька) и сделайте однократный щелчок левой клавишей «мыши»: фон блока в «Линейке» изменился. Это означает, что блок можно «переносить» в Схемное Окно. Переместите курсор в верхний левый угол Схемного Окна и щелкните 1 раз левой клавишей «мыши»: в поле Схемного Окна появился переносимый блок. . Далее выполните последний перенос блока в Схемное Окно: переместите курсор на «закладку» Данные, инициализируйте данную библиотеку типовых блоков, перенесите блок Временной график
. Далее выполните последний перенос блока в Схемное Окно: переместите курсор на «закладку» Данные, инициализируйте данную библиотеку типовых блоков, перенесите блок Временной график  в Схемное Окно примерно на желаемое место. Наконец, переместите курсор на крупную кнопку
в Схемное Окно примерно на желаемое место. Наконец, переместите курсор на крупную кнопку  в левой части «Линейки» типовых блоков и сделайте однократный щелчок: Вы временно «отключили» процедуру переноса блоков в схемное окно.
в левой части «Линейки» типовых блоков и сделайте однократный щелчок: Вы временно «отключили» процедуру переноса блоков в схемное окно.




 и сделайте однократный щелчок левой клавишей «мыши»: откроется диалоговое окно Параметры интегрирования с активной «закладкой» Основные
и сделайте однократный щелчок левой клавишей «мыши»: откроется диалоговое окно Параметры интегрирования с активной «закладкой» Основные
 и щелкните левой клавишей «мыши»: Вы запустили созданную задачу на счет. По окончании расчета появится специальное окно Сообщения с информацией: «Ошибка: Заданная точность не обеспечивается». Сообщение о точности можно проигнорировать. Щёлкните левой клавишей «мыши» по рисунку Временный график, откроется окно Временный график (рис. 1.12 ).
и щелкните левой клавишей «мыши»: Вы запустили созданную задачу на счет. По окончании расчета появится специальное окно Сообщения с информацией: «Ошибка: Заданная точность не обеспечивается». Сообщение о точности можно проигнорировать. Щёлкните левой клавишей «мыши» по рисунку Временный график, откроется окно Временный график (рис. 1.12 ).




